publications
2025
- preprint
 Data-Driven Soft Robot Control via Adiabatic Spectral SubmanifoldsRoshan S. Kaundinya, John Irvin Alora, Jonas G. Matt, and 3 more authorsMar 2025
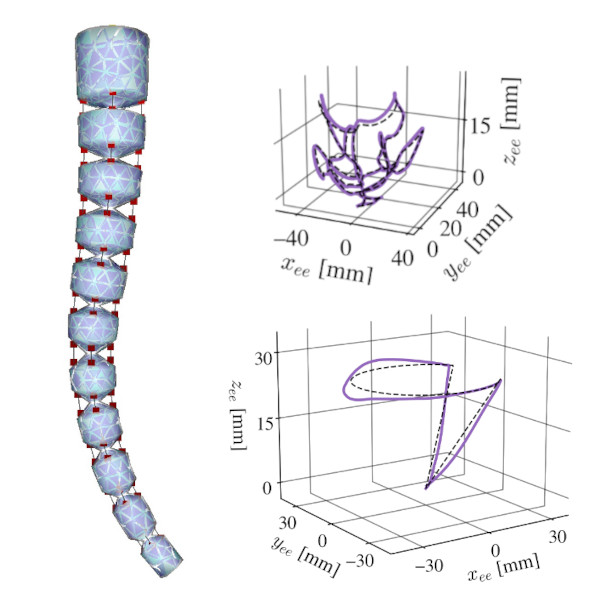
Data-Driven Soft Robot Control via Adiabatic Spectral SubmanifoldsRoshan S. Kaundinya, John Irvin Alora, Jonas G. Matt, and 3 more authorsMar 2025The mechanical complexity of soft robots creates significant challenges for their model-based control. Specifically, linear data-driven models have struggled to control soft robots on complex, spatially extended paths that explore regions with significant nonlinear behavior. To account for these nonlinearities, we develop here a model-predictive control strategy based on the recent theory of adiabatic spectral submanifolds (aSSMs). This theory is applicable because the internal vibrations of heavily overdamped robots decay at a speed that is much faster than the desired speed of the robot along its intended path. In that case, low-dimensional attracting invariant manifolds (aSSMs) emanate from the path and carry the dominant dynamics of the robot. Aided by this recent theory, we devise an aSSM-based model-predictive control scheme purely from data. We demonstrate the effectiveness of this data-driven model on various dynamic trajectory tracking tasks on a high-fidelity and high-dimensional finite-element model of a soft trunk robot. Notably, we find that four- or five-dimensional aSSM-reduced models outperform the tracking performance of other data-driven modeling methods by a factor up to 10 across all closed-loop control tasks.
- conference
 Lossless Compression of Time Series Data: A Comparative StudyJonas G. Matt, Pengcheng Huang, and Balz MaagIn 2025 IEEE 30th International Conference on Emerging Technologies and Factory Automation (ETFA), Sep 2025
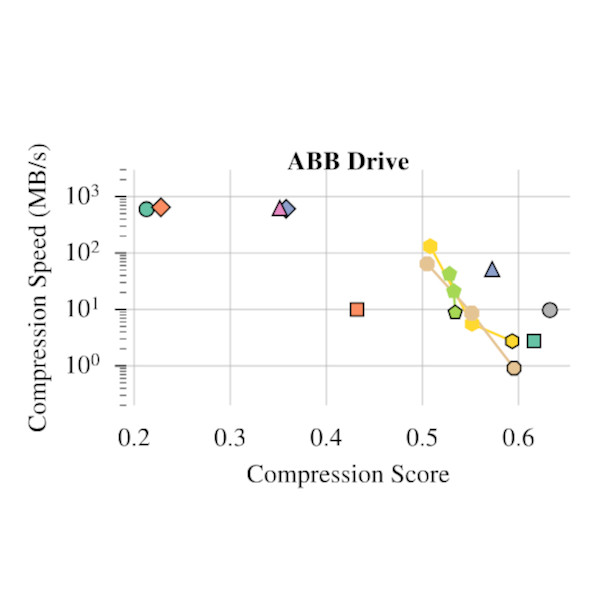
Lossless Compression of Time Series Data: A Comparative StudyJonas G. Matt, Pengcheng Huang, and Balz MaagIn 2025 IEEE 30th International Conference on Emerging Technologies and Factory Automation (ETFA), Sep 2025Our increasingly digital and connected world has led to the generation of unprecedented amounts of data. This data must be efficiently managed, transmitted, and stored to preserve resources and allow scalability. Data compression has therein been a key technology for a long time, resulting in a vast landscape of available techniques. This largest-to-date study analyzes and compares various lossless data compression methods for time series data. We present a unified framework encompassing two stages: data transformation and entropy encoding. We evaluate compression algorithms across both synthetic and real-world datasets with varying characteristics. Through ablation studies at each compression stage, we isolate the impact of individual components on overall compression performance–revealing the strengths and weaknesses of different algorithms when facing diverse time series properties. Our study underscores the importance of well-configured and complete compression pipelines beyond individual components or algorithms; it offers a comprehensive guide for selecting and composing the most appropriate compression algorithms tailored to specific datasets.
2024
- preprint
 Power Distribution Grid Enhancement via Online Feedback OptimizationJonas G. Matt, Lukas Ortmann, Saverio Bolognani, and 1 more authorFeb 2024
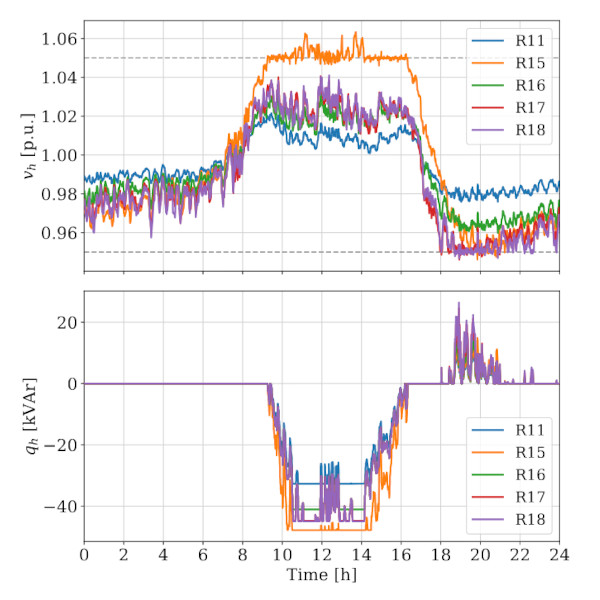
Power Distribution Grid Enhancement via Online Feedback OptimizationJonas G. Matt, Lukas Ortmann, Saverio Bolognani, and 1 more authorFeb 2024The rise in residential photovoltaics and other distributed energy sources poses unprecedented challenges for the operation of power distribution grids. When high amounts of active power are injected into the grid by such power sources, the overall power flow is often limited because of voltages reaching their upper acceptable limits. Volt/VAr control aims to raise this power flow limit by controlling the voltage using reactive power. This way, more active power can be transmitted safely without physically reinforcing the grid. In this paper, we use real consumption and generation data on a low-voltage CIGRÉ grid model and an experiment on a real distribution grid feeder to analyze how different Volt/VAr methods can enhance grid capacity, i.e., by how much they can improve the grid’s capability to transmit active power without building new lines. We show that droop control enhances the grid but vastly underutilizes the reactive power resources. We discuss how the effectiveness of droop control can be partially improved by employing machine-learning techniques to tune the droop coefficients, but we demonstrate that local control laws are inherently unable to achieve optimal grid enhancement. In contrast, methods that coordinate the use of reactive power resources across the grid, such as Online Feedback Optimization (OFO), can enhance the grid to its full potential. A numerical study performed on data from an entire year using a realistic grid model suggests that OFO can enable another 9% of maximum active power injections compared to droop control. To achieve that, OFO only requires voltage magnitude measurements, minimal model knowledge, and communication with the reactive power sources. A real-life experiment provides a demonstration of the practical feasibility of the proposed approach and enhanced the grid by another 10.5% compared to droop control.